
Investigadores del Tecnológico Nacional de México, Campus Tuxtla Gutiérrez (TecNM/ITTG), se encuentran trabajando en el desarrollo de un algoritmo que permite el control de aterrizaje de vehículos aéreos no tripulados (VANT), es decir, drones con los cuales se pueda analizar cualquier superficie e identificar el espacio ideal para aterrizar.
Los doctores Néstor Antonio Morales Navarro y Madaín Pérez Patricio, docentes del Tecnológico de Tuxtla Gutiérrez, explicaron que con este algoritmo el vehículo utilizado podrá ir detectando de manera eficiente y en tiempo real zonas de aterrizajes con condiciones óptimas.
El proyecto surgió con la finalidad de brindar apoyo a la población chiapaneca en casos de desastres, en los que muchas veces se requiere del uso de drones que analicen previamente las condiciones en las que se encuentran las zonas de difícil acceso para los equipos de ayuda y rescate.
Estado propenso a desastres
Néstor Antonio comentó que históricamente el estado ha sido afectado por inundaciones y sismos, haciendo que algunas comunidades o construcciones queden incomunicadas.
En la actualidad el uso de drones brinda el apoyo necesario para acceder a esos sitios, sin embargo, llegado el momento de su aterrizaje se requiere que los drones sean autónomos para poder aterrizar de manera segura, lo que es posible mediante el uso de inteligencia artificial (IA).
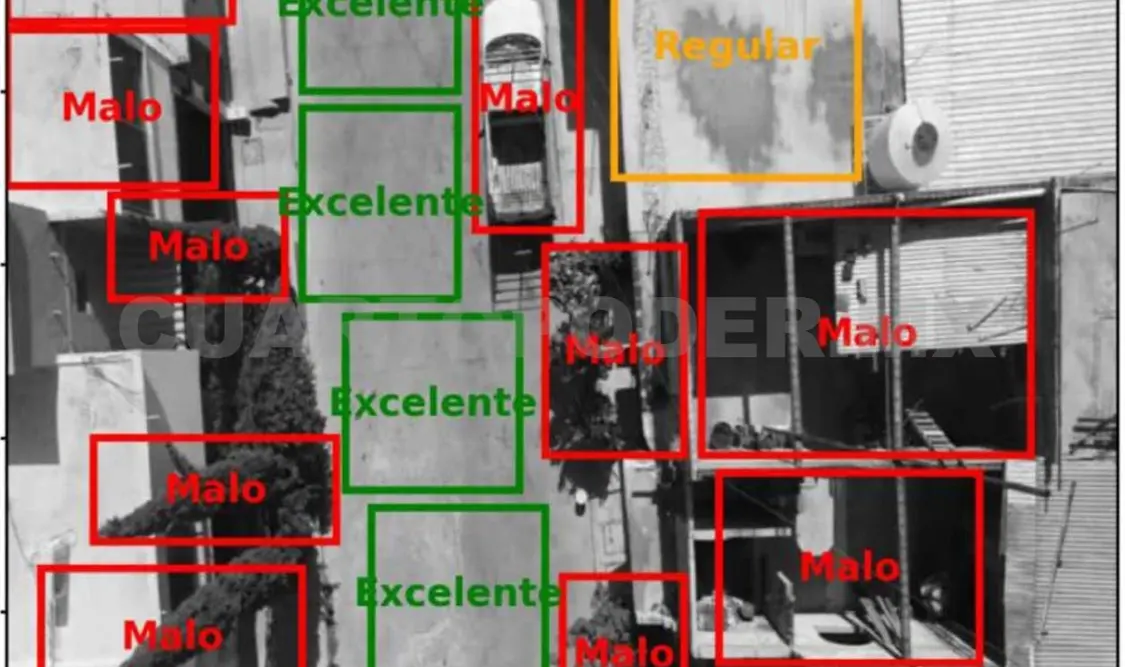
Detalló que lo que están haciendo es proponer el uso de un algoritmo que obtiene imágenes aéreas de la zona afectada o la zona de aterrizaje, y mediante las tomas captadas por la cámara del dron obtienen una imagen de profundidad, recopilando información de la superficie de cada objeto, edificio o calle que se encuentra en el lugar.
Este proyecto permitirá a un VANT —también conocido como dron— analizar la superficie que se encuentre recorriendo y determinar el espacio ideal para su aterrizaje, realizándolo de forma segura y sin dañarse el mismo dron, con la finalidad de proveer algún suministro o ayuda a la población.
Los drones regularmente poseen una cámara full HD o hasta 4K, misma que es usada por este algoritmo, comparando las imágenes y determinando la forma de cada objeto. Es así como la principal función del algoritmo se basa en procesar en tiempo real las imágenes de alta resolución que capta directamente la cámara del dron.









